

HRI using motion capture suit and hand-held devices
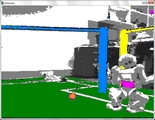
Real-time colour image segmentation
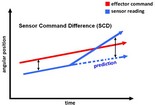
Motor learning
Research
My main research interest involves investigating factors that influence our trust towards robots and AI. It is important that our trust towards AI and robots accurately reflects the capabilities and competence envelope of the machine. See my publications for more info.
Examples of research I've done include investigating the impact of a robot's bodily movement upon trust, teaching a robot to hear, using motion capture for teleoperation without kinematic models, and coaching robot soccer players.
Past research has focused on a range of diverse aspects of autonomous systems. I've given plastic robots a sense of touch using neural networks, I've helped them to see, walk and kick.
I've also mused about the meaning of meaning for robots, in relation to the Chinese Room and symbol grounding,
in both my PhD thesis and other work.